I wanted some chamber / flood lights in my Voron Trident, and couldn’t find design I liked, so I made my own. I’m not an expert at mechanical design/CAD, and slowly getting less-bad at FreeCAD, but I’m pretty happy with the result. It’s now available on Printables.
I decided it was time for a 3D printer upgrade recently. I did some playing with my old Kossel, adding braces and changing some tuning since it runs Klipper, and while it continues to be a fine machine for small PLA parts, and a fun project, I wanted more volume, more speed, and an enclosure so I can run a wider range of materials. Instead of doing something reasonable and spending O($500) on one of the various commercial options that meets the “Enclosed, Larger, Faster 3D printer that I can run a wider range of materials on” prompt (the Qidi Q2 was a close contender) I decided I wanted to build a Voron Trident.
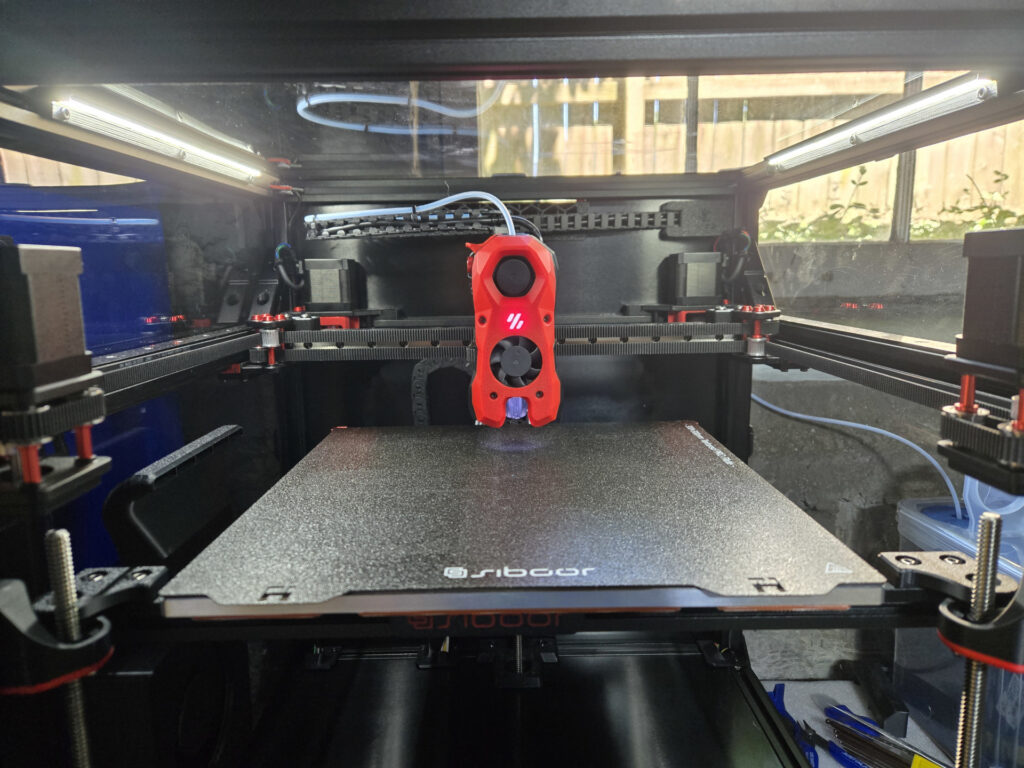
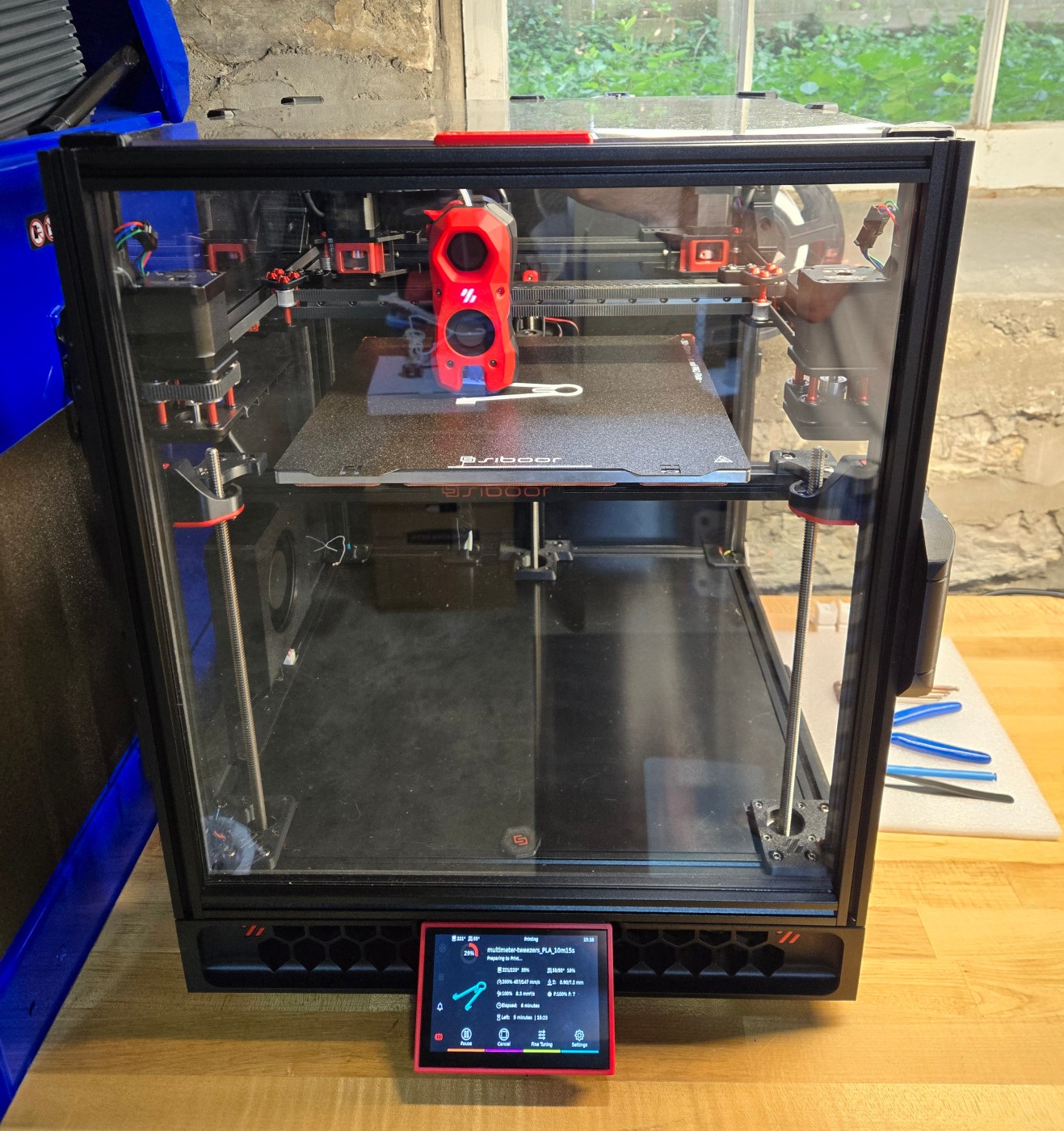
I did “some” reading so I had opinions on mods I wanted out of the gate… and ended up buying one of the ‘roided out Siboor Voron Trident “June ’24” 300mm CNC/AWD kits for (once import duties were paid and such) about $1500. That includes their “Booster Pack 1” option, so it has steel backers on Y, aluminum gantry corner braces (this was the feature I cared about – triangles are good), and TMC5160Ts on the X/Y motors, in addition to the kit standard CNC gantry with double-shear mounts and AWD (they nicely include the 2WD idlers as well, but don’t document the belt path using them), 9mm belts, inverted electronics, clickyclack door, fume pack, and (frankly kind of questionable) side booster fan. I thought I was getting a CB2 for the computer, but it came with a Pi CM4 (CM4102032), which I’m pleased about. I went for Siboor’s kit despite the Trident R2 already being partially announced because I wanted several of the nonstandard features they bundle, and I wanted to be sure I had it while I had time to spend the several-tens-of-hours to build and tune it before I had academic year obligations.
I ordered the kit via Siboor’s Aliexpress storefront May 14, it was delivered June 10, and printing June 20. It’s currently built essentially to kit instructions, and I’m very pleased with the build process and result. Since so much knowledge about these things is disappearing into search-proof proprietary silos (lookin’ at you, Discord), too much detail below.
Talking about the impact of AI on the the maintainers of open-source work the entire tech world is built on and no one wants to pay for (and many other artifacts of human effort being reprocessed and resold as unreliable derivative simulacra), I thought the classic xkcd2473: dependency, which is so frequently relevant it’s basically a meme template, could use an update.
Vehicle lifted from xkcd1990: Driving Cars to match style, and is incidentally also about irresponsible deployment of technologies in public.
I bought another computer. This one has a tragic origin story, an active pen with (like everything about it) shockingly good Linux support, and – bonus – has finally given me the impetus to switch from VirtualBox to libvirt for my VMs for obstinate software.
Trilith, my Dell Latitude 5340 2-in-1, pictured, as is tradition, with the current KDE default desktop at time of purchase.Continue reading →
TL;DR: If you have one of those sketchy Chinese metal-cage 500W spindle speed controllers that uses a potentiometer for speed control, the potentiometer terminal block is probably referenced to a dangerous voltage, be careful what you connect to it and/or replace it with a less dangerous one.
The only books I buy new anymore are beautiful things that appeal to my niche interests, which might become unavailable because they are niche… so my pre-ordered copy of Lori Emerson’s new book Other Networks: A Radical Technology Sourcebook arrived today.
Lori Emerson is one of the few people really prominently writing seriously in a media studies/anthropological sort of way about the history of technology, and I constantly assert that there isn’t enough of that, so I’m excited to see a win.
I found her via the press for her first book, Reading Writing Interfaces, which is fabulous and thought provoking (and I only have a handful of quibbles with it, mostly around promulgating some of Apple’s dubious self-centering history that they seeded to writers and journalists in the 90s, even where she clearly knows better) and have followed her online posts as she prepared this one – We even interacted online once or twice in those; I’m acknowledged in her piece The Net Has Never Been Neutral that didn’t end up in the book because of a conversation we had online about how different parts of the audience would understand the world “Neutral” in subtly and problematically different ways when she posted an earlier version.
At a skim, Other Networks is much less densely academic and analytical than Reading Writing Interfaces; it really is a sourcebook of curated examples of technologies and instances of those technologies, with the necessary breadcrumbs to set up the interesting properties and comparisons with others. I’m a little disappointed that some of the deep musings about other ways the thing that is the Internet could have been largely didn’t make it in to the book, but, from an editorial view, they are different content for a different audience than what it ended up being.
It is also beautiful; the binding and the typesetting and the illustrations, right down to this lovely little foiled glyph on the back cover. My copy is sitting next to Marcin Wichary’s Shift Happens, which is a benchmark for beautiful books, and it looks good.
I picked up a little MinisForum UM870 Slim in a 32GB/1TB configuration for about $463 on sale (from nominal $580 sticker price) a few weeks ago, just to have a decent piece of fixed hardware on my desk at home. I’d recommend these things to a large swath of the desktop market, with a few model-specific caveats. Details below.
Easily in the 1L ultra small form factor class, 130×126.5×50.4mm is about 0.8LContinue reading →
I don’t tend to post non-technical personal things here anymore, but Jenn and I went and got married this weekend. We essentially built a whole wedding around “Serious not-serious, wouldn’t it be fun to…” and it was, indeed, a good time. Remember that the serious part is signing a marriage license in a compliant way, everything else is just to suit you and (insomuch as you choose to care what they think) yours.
Spend years designing and crocheting a dress and flex on the other crafty folks. Fill your invitations with visual puns. Enter to “What I like About You” “For Once In My Life” (and don’t tell the bridesmaids ahead – the day was such a blur I forgot which was the decoy and which was played in the ceremony). Start the ceremony with a bit from The Princess Bride. Have your brother (in law) officiate because he once admitted “Man, I love weddings, I’ve always thought it would be fun to officiate one.” Slip in some gag bonus vows your partner doesn’t know ahead. Exit to “Turn Down for What.” First dance to “Boogie Shoes” to satisfy an in-joke. Put out coloring place mats for everyone and mark bags of crayons as place markers in the reception. Play orchestral arrangements of your favorite video game music in the background and see who notices. Get casual family-style catering from the restaurant you went to on your first date. Pick your cake because it’s delicious. Do you.
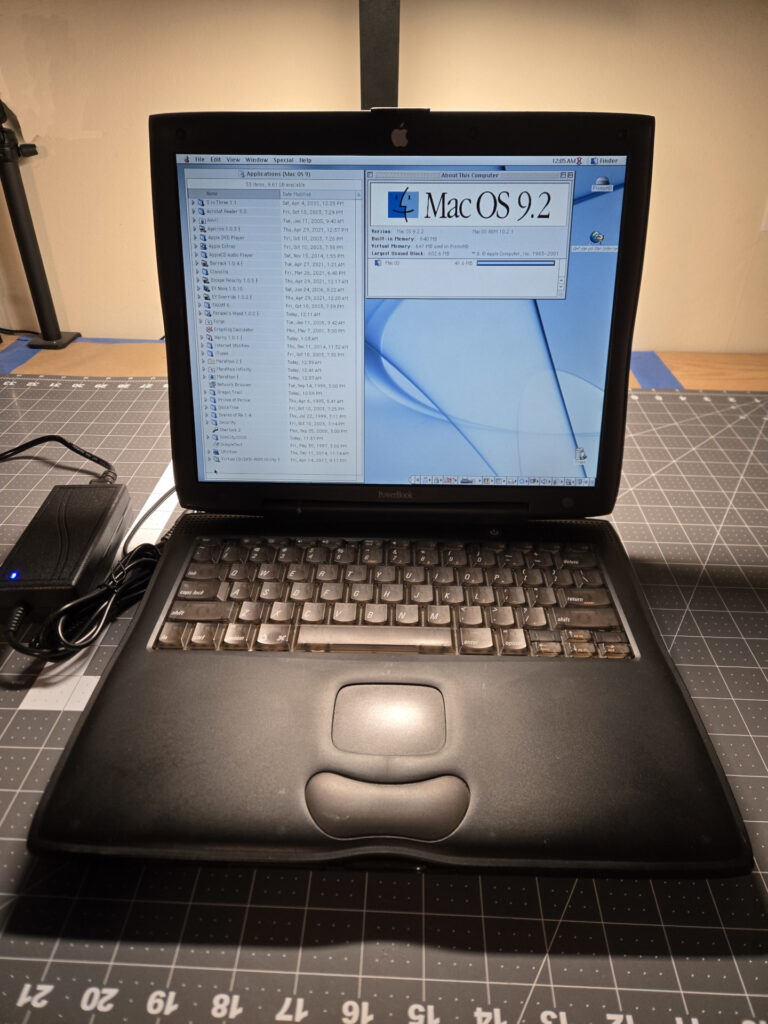
I’ve wanted one of the curvy bronze-keyboard G3 Powerbooks since they were new – I’ve always been kind of taken by the design language (half business, half iBook). I got to play with a university-owned Wallstreet for a while as a kid, so I remember them beyond looking in catalogs, and uh… I really like a bunch of classic Mac games and want a convenient late-classic machine to run them natively, because a few are glitchy in emulation.
So, I occasionally lowball bid promising auctions when one comes up somewhere. A few months ago (in late February) there were a succession of them on ShopGoodwill, and I tossed a $50 max bid on a Pismo in the 500MHz/128MB/12GB/DVD configuration in unknown electrical and OK but not perfect cosmetic condition. And, surprisingly, won. It ended up being about $67 with shipping/handling/tax/etc. Since working condition examples tend to be around $200, this seems like a decent deal. It survived the typically awful shipping, and, in long form below, it turned out to be a good buy.
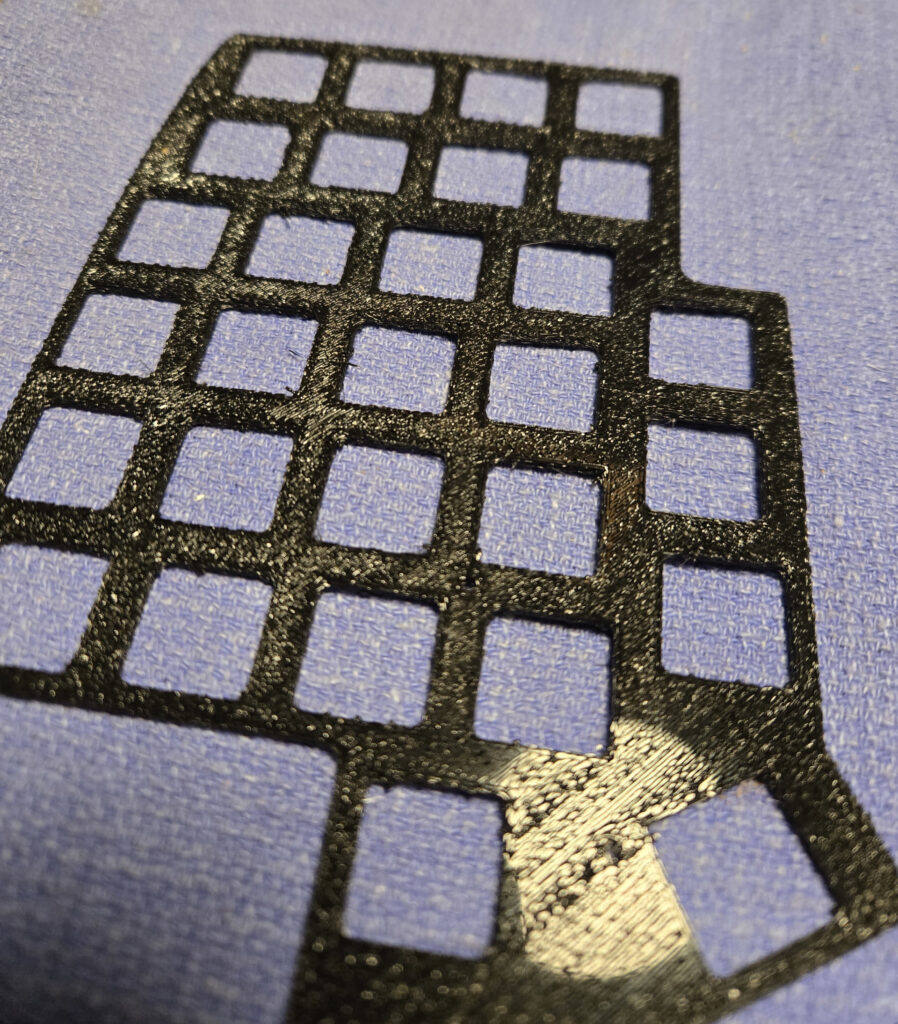
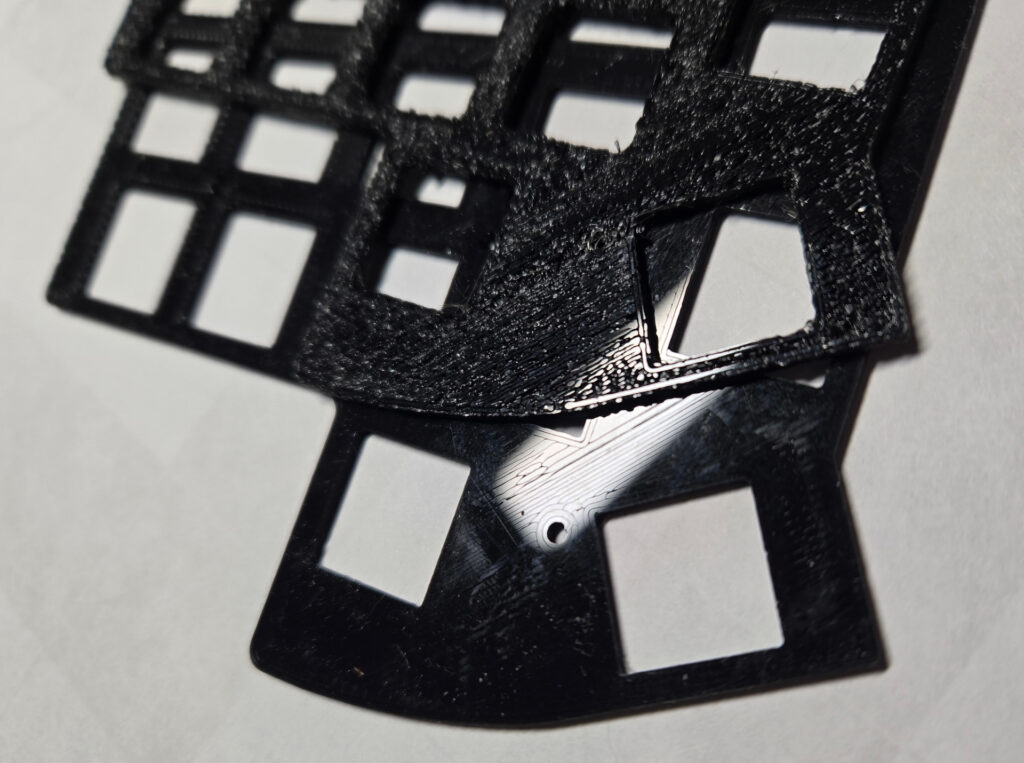
I’ve had a few projects recently that needed 3D printed parts, went to use a roll of black eSun PLA+ that I accidentally left out in my basement for some time, and it produced the telltale dull, rough, stringy, gappy print quality of hydrated filament. Since I have some energy for projects right now, I decided it was finally time to get a filament dehydrator setup.
Pretty sure PLA printed to a glass bed shouldn’t look like this…
I went reading up about filament dehydration. The purpose-made filament dryers mostly seem to have a problem with actually removing moisture, most of them are dry boxes with no exhaust path, and the liberated water vapor has to go somewhere. Many seem to rely on instructions for the user to periodically open the lid during drying (which is …not automated), and a few contain a large amount of desiccant that will be more-hydrophilic than most filaments at drying temperatures, then itself require dehydration. Bambu seems to be doing basically the right thing with the AMS2 Pro and it’s automatic exhaust valve, but I’m not in the Bambu ecosystem and not looking to spend that kind of money.
So, instead, I looked at the DIY options. There are a variety of clever schemes with PID controllers and heating elements… but lot of folks seem to just repurpose inexpensive food dehydrators, and I went with a variation on that plan.
I picked up a $40 Elite Gourmet EFD770WD dehydrator; I paid a few extra bucks for a model with a digital thermostat/timer. It gets me a heater, a blower, and thermostatic control in a package that is at least theoretically safe for consumer use, which is really all that is called for. There are many directions on the internet for cutting the grilles out of several trays on this style of dehydrator to make a spool-sized cavity, and many designs for large, elaborate, and almost inevitably multi-part printable extension tubes, which must be printed in a filament still rigid at the highest drying temperature you expect to need. The former seems wasteful and the latter seems like a tedious hassle.
A little foamcore and tape to make a suitable cavity.
I did something much lazier and made a tube out of foamcore. Just bent it using the little tabs for aligning the trays and taped. Mine is two pieces because none of my scrap pieces were quite large enough to do it in one. The foamcore is slightly insulating which seems like a minor feature, and this method isn’t many hours of printing or destructive, which is a major feature. I also saw several folks modifying a 3.5gal or 5gal paint bucket with a diameter around 12.5″, and I may try that in the future as a more polished solution, but didn’t have a suitable empty on hand.
This particular dehydrator only lets you pick specific temperatures, but 115 and 125F are options right to either end of the suggested range for drying PLA variants. As for effectiveness, the main subject roll of black eSun PLA+ that sat out for a couple months, whose behavior is pictured above, went in for 8 hours at 115F, and initial results were really promising.
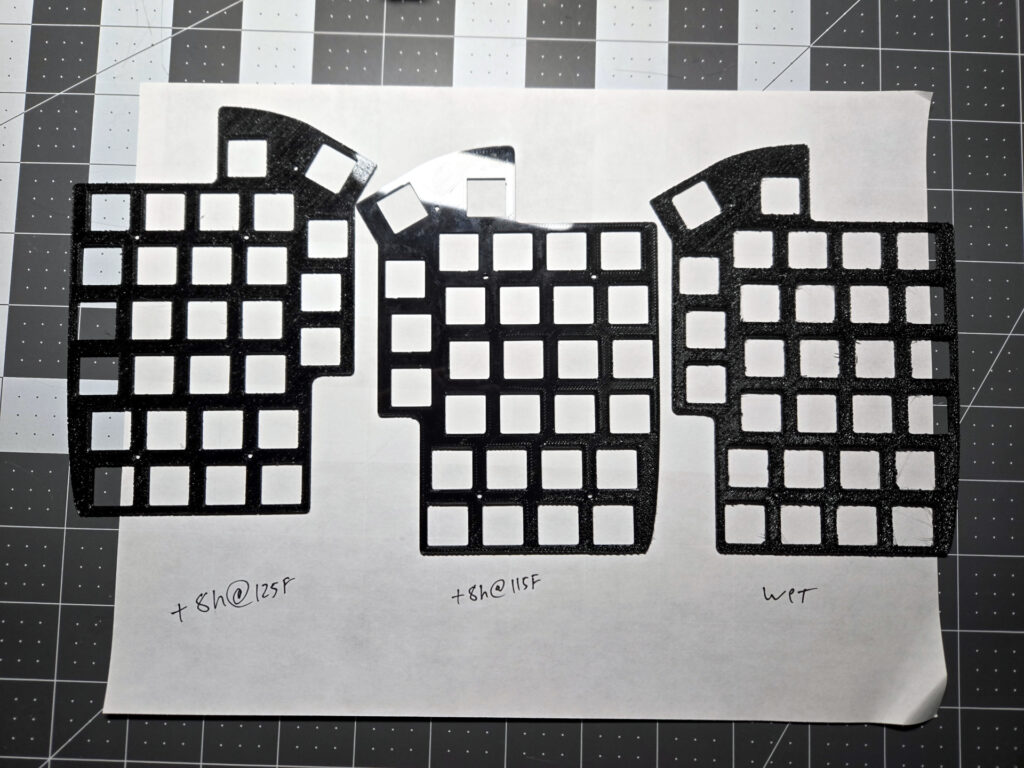
The first experiment looked really promising; Same printer, same gcode, top print before drying, bottom print after 8H@115F. Almost all defects were gone from the first layer.
There were still some hydration-looking defects in areas (and the thermocouple I had shoved in through one of the lid slots of the dehydrator as a safety was reading a little low), so I gave it another 8 hours at 125F. And the results didn’t really change, but there was no obvious degradation. It has a dead spool producing parts that are usable if a little textured, which is worthwhile.
Similar parts printed wet, dried for 8 hours at 115F, and dried an additional 8 hours at 125F. It’s unclear if the subsequent/hotter drying offers any significant benefit.
PLA+ is always a bit of a mystery material, I’ve generally supposed that much of it is doped with a couple percent PBT, but the relevant eSun PLA+ MSDS just shows 2-4% calcium carbonate (which apparently just provides nucleation sites to improve the crystallization) and 2-5% “other,” (likely pigment). CaCO3 isn’t very soluble in water, but who knows how it moved around or altered crystallization or whatnot during the wet-dry cycle. I ran some Inland “Egyptian Blue” regular PLA that had sat out in the basement for a while through a similar 8h@125F cycle and it did seem to reduce the surface irregularities (pips, especially on corners) between the previous and next part I printed in it, but not in such a dramatic way.
From a somewhat-amateur reading of the relevant literature, it seems like not all the hydration induced changes should be reversible. The most relevant thing I could find was Beyond Biodegradability of Poly(lactic acid): Physical and Chemical Stability in Humid Environments (2017) which looks at degradation due to liquid and vapor phase water infiltration, and found pretty substantial chemical changes especially from vapor at higher temperature. The literature in general is a little spotty, there are more liquid phase studies (eg. ref), but studies like the earlier one comparing liquid and vapor phase water infiltration indicate they aren’t entirely comparable. The literature on drying is “thin,” and the relevant Internet content is thoroughly astroturfed by vendors trying to sell you gadgets (which is becoming a real problem in the 3D printing market in general; good luck finding un-sponsored information about anything). I’m sure some of the commercial (bio)plastic manufacturers/processors have detailed internal documentation, but they aren’t sharing.
In the same order as they dryer, I picked up some indicating desiccant packs to improve my ability to monitor and dry filament in bags. I’m so distrustful of Amazon junk now, I stuck one in the bathroom to absorb shower steam to see what the indicator hydration process looked like, and it is slowly turning pink after being repeatedly exposed to shower steam. Hopefully storing filament with known-dry desiccant will help keep it from going bad – at least as long as I continue avoiding any of the truly hydrophilic materials like Nylon that require special handling.
All in all: Hydration is absolutely a problem for PLA and adjacent materials, drying is imperfect but effective, slightly modified food dehydrators that exhaust the vapor do a fine job, and keeping material dry is better than trying to dry it.
Your work is going to fill a large part of your life, and the only way to be truly satisfied is to do what you believe is great work. And the only way to do great work is to love what you do…